本项目来源于国家杰出青年科学基金“电动汽车用新型磁通切换电机系统基础理论研究(No. 51825701)”,起止时间2019.01-2023.12。本项目工作概括如下。
一、主要研究内容
本项目基于所提出一种新型结构的转子永磁型磁通切换电机,从研究兼顾低速大转矩和恒功率区宽调速的新型磁通切换电机拓扑结构着手,建立通用设计准则和优化设计方法。建立精确材料特性模型,研究电机多物理场耦合规律,准确分析电机输出特性,并探究基于复杂约束下的电机材料性能极限发挥与强化传热冷却系统的设计原理。针对产品加工误差对电机驱动系统的影响,研究电机与控制器参数敏感性及变化规律,并开展健壮性优化理论研究,建立电机驱动系统健壮性评估数学模型。结合新能源汽车用电机驱动系统高可靠性的性能需求,开展集状态监测、故障诊断、远程通信、实时控制于一体的智能化电机系统冗余与容错运行技术研究。本项目主要研究内容包括以下四部分:(1)兼顾低速大转矩和恒功率区宽调速的新型磁通切换电机拓扑结构;(2)基于精细材料属性的电机多物理场耦合特性精确分析与极限设计方法;(3)基于系统级健壮性的驱动电机系统多目标优化设计方法;(4)集监测、诊断、通信、控制于一体的智能化电机系统容错运行技术。
本文根据上述主要研究内容,重点介绍以下四部分研究成果:
(1)新型转子永磁型磁通切换电机;
(2)模块化多单元磁通切换永磁轮毂电机;
(3)计及磁动势波动现象的卡特系数改进;
(4)基于分层驱动控制架构的轮毂电机容错运行策略。
二、 研究方法及研究成果
2.1 新型转子永磁型磁通切换电机
为解决定子永磁型磁通切换(Stator Permanent Magnet-Flux Switching,简称SPM-FS)电机定子齿部磁饱和严重问题,本文提出一种转子永磁型磁通切换(Rotor Permanent Magnet-Flux Switching,简称RPM-FS)电机,其转子与SPM-FS电机定子相似,均采用模块化设计。永磁体由定子侧移至转子,与相临两转子凸极齿共同构成转子模块单元。10个转子模块单元通过卡槽固定于非导磁支撑件上,构成转子整体。原SPM-FS电机相邻两定子“U”型铁心合并成一个整体,共同构成RPM-FS电机的12个电枢齿。电机的电枢绕组采用集中绕组结构,绕置于合并后的电枢齿上。此外,为了给永磁磁链提供回路,在转子旋转过程中实现“磁通切换”,相邻两电枢齿之间添加一个容错齿。24s/10p三相RPM-FS电机拓扑结构,如图1-1所示。
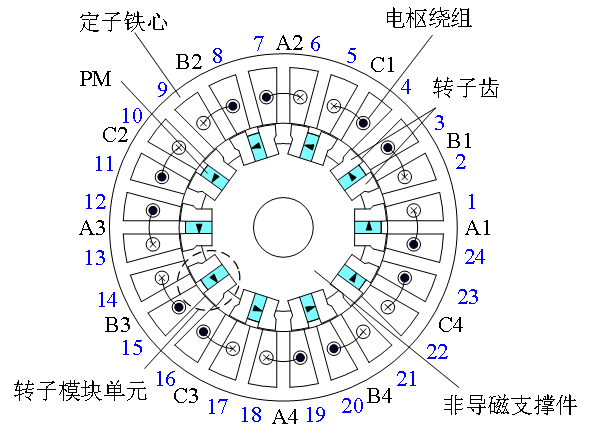
图 1-1 三相24s/10p RPM-FS电机拓扑结构
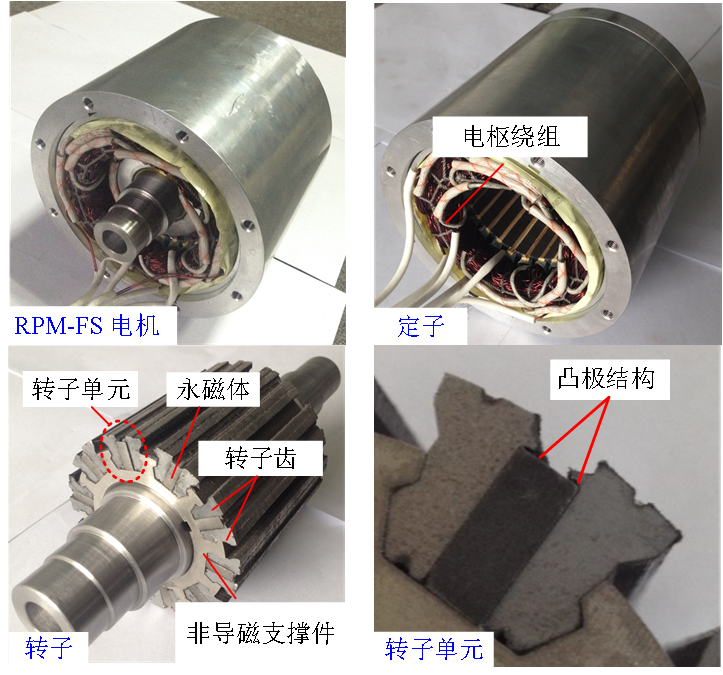
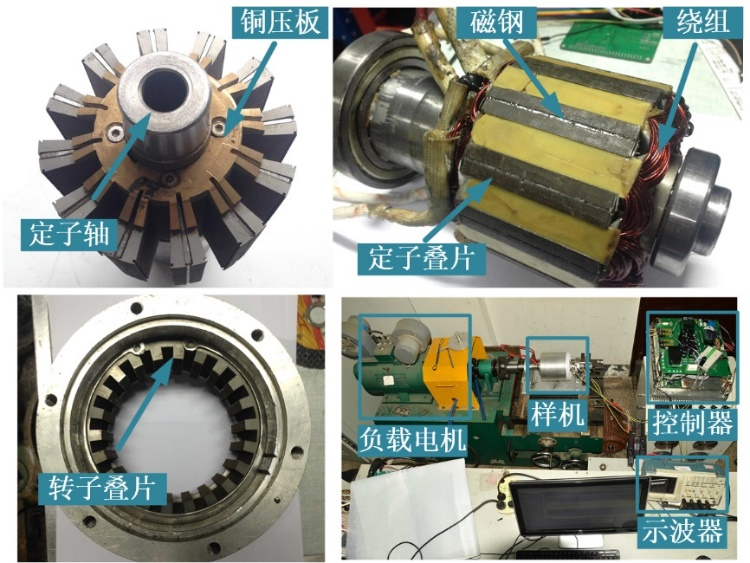
本课题设计并加工了一台24s/10p RPM-FS电机,样机结构如图1-2所示。针对加工样机对其空载反电势、定位力矩、负载特性、调速性能和效率MAP进行测试。
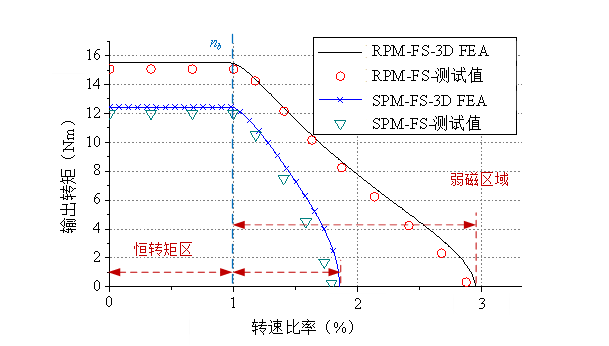
测试结果表明保持高效率、高功率密度优点的同时弱磁调速范围拓宽67%,永磁体利用率提高至59.4Nm/kg,转矩提升25%,脉动降低50%。
|
|
|
图 1-2 24s/10p RPM-FS电机样机 |
|
|
|
图 1-3 RPM-FS电机与SPM-FS电机弱磁调速能力 |
2.2 模块化多单元磁通切换永磁轮毂电机
(1) 模块化多单元磁通切换永磁轮毂电机设计理论与分析方法
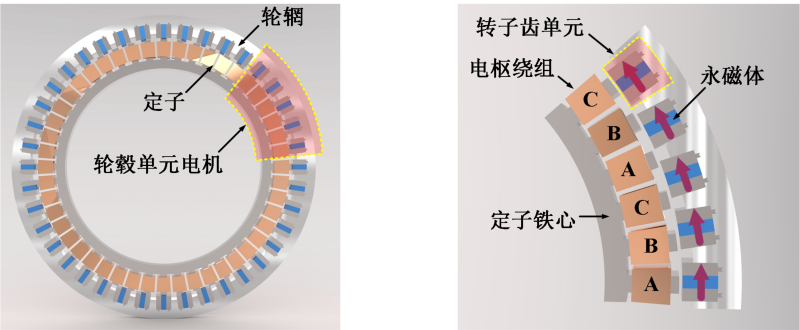
为了突破现有轮毂电机技术的束缚,将“磁通切换”原理与电动汽车驱动领域“单元化电机”与“模块化驱动”等最新设计理念相融合,本项目提出一类满足四轮独立驱动电动汽车运行特点、具有高转矩密度、高效率、高集成度以及高可靠性的新型模块化多单元磁通切换永磁轮毂电机。该电机整体以及单元电机结构示意图如图2-1所示,该电机由沿圆周方向对称分布的N个(图中为8个)单元化电机构成,每个单元化电机空间所占角度为45o,如图2-1(b)所示。每个单元电机的内定子铁心由6个凸极构成,三相对称集中式电枢绕组绕置于定子齿上,而每个单元电机的外转子由5个转子极构成,每个转子极由一块切向充磁的“单极性”永磁体与两个凸极铁心齿组成,且5块永磁体充磁方向一致。各转子极之间通过位于轮辋的非导磁支撑件形成“燕尾槽式结构”连接为一个整体,实现了轮毂电机外转子与轮辋的高度集成,有效提高了轮毂空间利用率。
|
|
|
|
(a) 轮毂电机整体结构 |
(b) 单元轮毂电机 |
|
图 2-1 模块化多单元磁通切换永磁轮毂电机整体与单元轮毂电机结构图 |
|
项目组设计加工了一台小功率样机,通过有限元分析与实验测试的方法,对比了模块化多单元磁通切换永磁轮毂电机与常规永磁轮毂电机的空载与带载性能。仿真和实验结果表明模块化多单元磁通切换永磁轮毂电机具有更高的转矩输出能力,更高的电机效率,更强的弱磁能力,更宽的调速范围。
|
|
|
图 2-2 原理样机与测试平台 |
(2) 模块化多单元磁通切换永磁轮毂电机分层一体化设计与驱动控制架构
为满足直驱式轮毂电机低速多极、高集成度、冗余与容错控制等特性要求,本项目提出了基于“多单元电机-模块化驱动-冗余热备份控制”的电机及其驱动系统的分层一体化设计与控制架构。图2-3为该轮毂电机及其驱动系统的分层一体化设计与驱动控制架构。可见,本项目采用基于N个单元化电机、M个模块化驱动控制电路、K个核心控制器的N-M-K分层驱动控制系统架构。在驱动层,为实现多单元电机的高效控制,仅采用了4个模块化驱动控制器实现了对8个单元化电机的控制。通过选取合理的极槽配比,使得相邻的2个单元化电机在电磁特性上完全对称,这为相邻2个单元化电机通过同一个驱动控制电路供电提供了前提。在控制层,采用2个核心控制器实现控制层的冗余和热备份。车辆运行过程中,当一个核心控制器发生故障时,可通过冗余热备份技术,将备份控制器单元升格为主核心控制器单元,从而有效提高了该轮毂电机驱动系统的容错运行能力和高可靠性。
|
|
|
图 2-3 基于N-M-K多单元模块化分层驱动控制架构的电机驱动系统 |

2.3 计及磁动势波动现象的卡特系数改进
本项目从气隙磁场调制三要素中的“励磁源”角度出发,以如图1-1所示的RPM-FS为研究对象,通过许克变换计算开槽对磁导分布的影响,利用集总参数磁路模型计算开槽对每极磁导大小的影响,进而提出一种改进的卡特系数,用于表征精确表征凸极磁阻调制器对源励磁磁动势的影响。改进的卡特系数定义如下:
|
|
(3-1) |

其中,γpole-pitch为极距角,i为定子齿的序数,λr(θ, α)为相对磁导函数。
改进后的卡特系数是转子位置角的函数,如图3-1(a)所示。图3-1(b)所示为利用改进卡特系数修正后的磁动势分布,与传统卡特系数所得气隙磁势峰值均相等不同,改进后的磁势峰值与转子位置有关。相比传统方法,如图3-1所示改进后的气隙磁密波形呈现了峰值波动现象。图3-2给出了采用传统卡特系数、改进卡特系数所得的电机性能解析分析结果与有限元仿真及实验结果的对比,显然改进的卡特系数解析结果更接近实验波形。
|
|
|
|
(a) 改进卡特系数 |
(b) 修正后的磁动势分布 |
|
图 3-1 改进卡特系数示意图 |
|


|
|
|
|
(a) 磁密波形 |
(b) 磁密谐波分布 |
|
|
|
|
(c) 相反电势波形 |
(d) 每相空载反电势谐波分布 |
|
图 3-2 采用改进卡特系数计算的电机性能验证 |
|




2.4 基于分层驱动控制架构的轮毂电机容错运行策略
(1) 模块化多单元电机运行模式
本项目所研究的模块化多单元磁通切换永磁轮毂电机涉及多子电机控制技术。通过极槽的配合,使各个单元之间同相位。进一步对电机运行时电流的流通情况进行观察分析可以发现,多单元电机运行时与将各个单元合并成一台三相电机运行时电流流通路径相同,这就相当于将一台串联型的电机改成了并联的结构。在不改变电机整体性能的前提下,并联结构可以降低绕组中的电流,同时也降低了功率器件的容量。由于各个单元同相位,因此对于多单元电机的控制可以简化成对普通三相电机的控制。由于电机总出力是各个单元出力叠加的结果,为了使电机出力尽可能大,应使各个单元同步运行。结合DSP在处理复杂算法能力上的优势以及FPGA并行执行的优势,将DSP和FPGA联合起来对多单元电机进行控制。为了简化DSP与FPGA之间的通讯,在硬件上将DSP和FPGA的地址总线和数据总线相连,采用按址赋值的方式进行数据的交互。控制器设计架构如图4-1所示,实物图如图4-2所示。
|
|
|
|
图 4-1 DSP+FPGA组合控制方案 |
|
|
|
|
|
(a) 控制器俯视图 |
(b) 控制器俯视图 |
|
图 4-2 研制的电机控制器 |
|



(2) 模块化多单元电机容错控制算法
本项目研究了模块化多单元磁通切换永磁轮毂电机容错运行时的控制策略。首先,根据故障前后磁动势不变的原则,对故障电机进行电流滞环控制。根据电机不同的连接拓扑以及优化目标,设计了不同的电流重构方案,经对比分析后确定了最优方案。其次,考虑到电流滞环控制时功率器件的开关频率不固定,控制性能不佳。为了提高控制性能,基于载波脉宽调制控制算法,分别提出了适用于单相开路故障与两相开路故障的载波脉宽调制策略(CBPWM),该方法可以显著抑制电流中的谐波含量,但不能实现各个子电机的独立控制。进一步,为了实现各子电机之间的独立控制,提出了一种适用于单相开路故障的空间电压矢量脉宽调制策略(Signal Phase Open Circuit Space Vector Plus Width Modulation,简称SPOC-SVPWM)。最后,完成了电流滞环控制、CBPWM、SPOC-SVPWM的仿真和实验验证。实验结果如图4-3-图4-7所示。
|
|
|
图 4-3 以剩余健康相绕组总铜耗最小为优化目标的实验结果@50r/min&5N.m |
|
|
|
图 4-4 以剩余健康相绕组电流相等为优化目标的实验结果@50r/min&5N.m |
|
|
|
图 4-5 A1相开路时的实验结果@100 r/min&10N.m |
|
|
|
图 4-6 A1B1C1相开路时的实验结果@300r/min&10N.m |
|
|
|
图 4-7 B1C1A3相开路时采用正常控制算法电机的运行工况 |





三、主要研究成果
本项目全面建立转子永磁型磁通切换电机的理论体系,有效解决定子永磁型磁通切换电机应用于乘用车、商务车等大功率驱动系统的问题与不足。撰写高水平文章共51篇,其中SCI 39篇,EI 12篇;发表学术专著1部;授权发明专利24项(其中3项为美国专利);已获软件著作权5项。