图片来源 关于公布2020年东南大学优秀博士硕士学位论文评选结果的通知
公示网址链接:https://radio.seu.edu.cn/2020/0715/c19195a340133/pagem.htm?ivk_sa=1024320u
1
个人简介
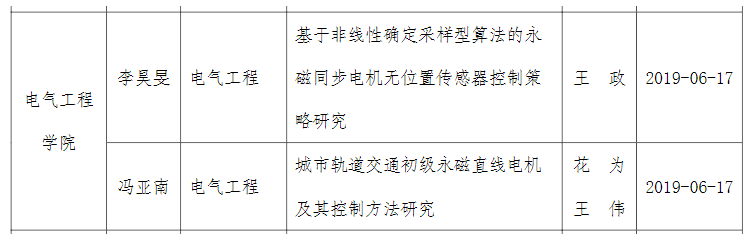
李昊旻,东南大学电气工程学院2019届硕士研究生,于2016年9月入学,导师为王政教授,硕士阶段主要研究方向为永磁同步电机的新型控制算法。
冯亚南,东南大学电气工程学院2019届硕士研究生,于2016年9月入学,导师为花为教授及王伟副研究员,硕士阶段主要研究方向为永磁直线电机的控制算法。
2
获奖喜讯
近日,东南大学公布了2020年东南大学优秀博士硕士学位论文评选结果。经学科学位评定分委员会推荐,校内专家复审遴选,共评出42篇优秀博士学位论文、45篇优秀硕士学术学位论文以及27篇优秀硕士专业学位论文。
其中,两位JEMPEL的优秀毕业生硕士学位论文成功入选2020年东南大学优秀硕士学术学位论文名单,分别是:硕士生李昊旻的硕士学位论文《基于非线性确定采样型算法的永磁同步电机无位置传感器控制策略研究》、硕士生冯亚南的硕士学位论文《城市轨道交通初级永磁直线电机及其控制方法研究》。
3
论文摘要
论文摘要--李昊旻
三相永磁同步电机(PMSM)的矢量控制性能取决于转子位置的检测精度,在许多实际应用场合,出于对环境、成本或系统结构限制等因素的考虑无法在电机上安装额外的位置传感器,论文以此为背景,探讨将容积卡尔曼滤波算法(CKF)用于解决无位置传感器磁场定向控制中PMSM的速度和转子位置状态估计问题的可行性,对基于CKF算法的PMSM矢量控制驱动系统的电机状态估计进行了详细的理论分析、仿真研究和实验验证。
CKF算法是非线性卡尔曼滤波估计算法发展史上的一个里程碑式的成果,它的出现给非线性滤波领域开创了一个全新的、极富生命力的方向。CKF依托不变量理论,采用3阶球面-径向容积准则对多维高斯加权的非线性函数积分进行数值近似,从而实现对状态后验概率密度统计特性的捕获。作为卡尔曼滤波算法中的一员,CKF保留了卡尔曼滤波框架典型的简洁、优雅、高效的递推形式,与基于Taylor展开的EKF相比,CKF具有更高的估计精度和对非线性的适应能力,与UKF相比,CKF具有更为严格的数学推导和在高维非线性滤波问题中更优异的数值稳定性,与GHF相比,CKF在保持较高估计精度、数值稳定性的同时还具有高计算效率。
在电气领域,与卡尔曼滤波有关的电机无位置传感器控制状态估计方法的研究主要集中在EKF的应用上,然而这是半个世纪前的方法,近20年以来非线性滤波领域已经发展出了若干优秀的滤波算法,尤其是最晚出现的、目前非线性滤波领域内最先进的算法CKF,然而这些更为先进的方法并没有被大量应用到电机的状态估计问题中,对它们的研究寥寥无几,很少有研究将其与交流电机的状态估计问题相结合。
本论文对基于CKF的状态估计方法在永磁同步电机无位置传感器控制中的应用进行了全面研究。在详细介绍完贝叶斯滤波框架、不变量理论和高维数值积分等理论基础之后给出了CKF算法的详细推导过程,同时从数值稳定性角度出发给出了平方根分解算法SCKF。将CKF引入到PMSM状态估计问题中,利用电机在静止坐标系下的状态方程和观测方程,设计PMSM转子转速和位置状态的容积卡尔曼滤波估计算法,利用Matlab/Simulink对论文所提方法进行预验证,仿真结果表明CKF算法无论是对于矢量控制方法还是对于直接转矩控制方法中的电机状态估计问题都有着良好的表现。为进一步验证容积卡尔曼滤波理论的实际应用价值,搭建了基于TMS320F28377D芯片的PMSM数字控制驱动平台并进行了各种典型的动态实验测试和参数不确定情况下估计精度的测试,实验结果表明基于CKF算法的PMSM状态估计方法在宽调速范围内都具有良好的稳态和动态表现。
关键词: 永磁同步电机, 无位置传感器控制, 容积卡尔曼滤波
论文摘要--冯亚南
随着环境污染和交通拥堵问题的日益加深,具有运输量大、速度快、绿色环保等优势的城市轨道交通越来越受到政府和人民的青睐。由于永磁体和电枢绕组都安装在动子上,在城市轨道交通这样的长距离运输系统中,初级永磁直线电机自然而然地引起了国内外学者的关注。而城市轨道交通牵引系统是多台初级永磁直线电机牵引系统,这必将导致电流传感器的应用数目大大增多,随之而来的是故障率的明显加大。要保证城市轨道交通牵引系统的稳定性和安全性,城市轨道交通列车牵引系统的电流传感器容错控制举足轻重。
本课题开展针对城市轨道交通初级永磁直线电机牵引系统的研究,主要的研究内容有下面几部分:
1)阐述课题研究的背景与意义,说明国内外城市轨道交通的发展现状,论述述城市轨道交通直线电机牵引系统的现阶段发展状况。
2)针对初级永磁直线电机进行了电磁设计与建模。首先,进行了有限元分析,计算了永磁磁链、反电动势、动态电感、损耗、法向力与定位力、静态电磁推力等特性。其次,建立初级永磁直线电机的功率方程并推导了电机的尺寸方程。最后,推导了初级永磁直线电机dq坐标系下的数学模型,为后面的控制方法的提出和实验证明提供了理论支撑。
3)针对单直流母线电流传感器提出了一种新型直接推力控制策略。一相电流由直接测量得到;根据有限延迟测量原则,得到第二相电流;根据三相电流之和为零得到第三相电流。为了避免测量电流长时间沦陷在某一相,一旦沦陷时间达到极限时间,则根据单目标优化原则重新选择电压矢量。新型直接推力控制不仅具有鲁棒性好的特点,而且能保持和标准直接推力控制几乎一样的稳态和瞬态性能。
4)针对单相电流传感器提出了一种容错控制策略。首先,根据dq轴参考电流和残存的相电流得到估测dq轴电流,并且从理论上证明了估测的正确性。其次,第一次在单相电流传感器容错控制中用到了电压解耦,很大程度上提高了电流的动态响应。和现有的容错控制相比,本课题所提的单相电流传感器容错控制具有更好的鲁棒性和瞬态性能。
5)针对无电流传感器提出了一种电流滞环控制策略。鉴于dq轴测量电流和估测电流具有一一对应关系,在估测的交直轴电流相同的情况下,故障动子和正常动子可以具有相同的dq轴测量电流。所提无电流传感器控制充分利用多动子牵引系统的特性,通过其他正常动子的牵引逆变器确定故障动子牵引逆变器的交直轴电流参考值,进而实现无电流传感器控制。
6 围绕dSPACE DS1103控制器为中心,搭建城市轨道交通初级永磁直线电机牵引系统实验平台。
关键词: 城市轨道交通, 牵引系统, 初级永磁直线电机, 电流传感器, 容错控制, dSPACE